省エネ化のための車載コンピューティング・シミュレーション技術の開発とは
グリーンイノベーション基金事業で電動・自動走行車の普及に備える
電動・自動走行車の普及が進む将来のモビリティ社会と、それを実現するうえで必要な車載コンピューティングについて、「自動走行の普及が進む社会に向けて 車載コンピューティング・シミュレーション技術とは」でご紹介してきました。課題としては自動運転システム等が進むなかで膨大な情報量が生じ、その情報の伝達・処理に関わるネットワーク・クラウドに大きな負荷がかかり、電力消費量が増大することが考えられます。
こうした課題を乗り越え、自動運転・電動化モビリティの進展を支えるべく、グリーンイノベーション基金事業では「電動車等省エネ化のための車載コンピューティング・シミュレーション技術の開発」プロジェクトを進めています。具体的にどのような取り組みが進んでいるのか、プロジェクトを推進する方々に伺いました。
将来のモビリティ社会に関わるコンピューティング関連の技術

――2050年に想定されるモビリティ社会と、車載コンピューティングにおける課題について教えてください
伊藤建氏
今後、自動走行車が増加していく展望に伴って、車載コンピューティングにおける課題と解決策を考える必要があります。ただし自動走行車の実現には、環境把握、検知、適切な操作の決定、操作の実行等、高度な情報処理技術が必要です。また自動走行車が安全に走るためには、車の情報を外部と共有する必要もあります。ネットワークを介して大量の情報を伝達する負荷や、あちこちの車両から寄せられるデータを統合するクラウド上での情報処理負荷も相当かかります。こうした負荷に対して、必要な電力消費量もあがっていきます。高度な操作を可能にしつつ、全体としての必要な電力消費量を抑える車載コンピューティングの取り組みが求められています。
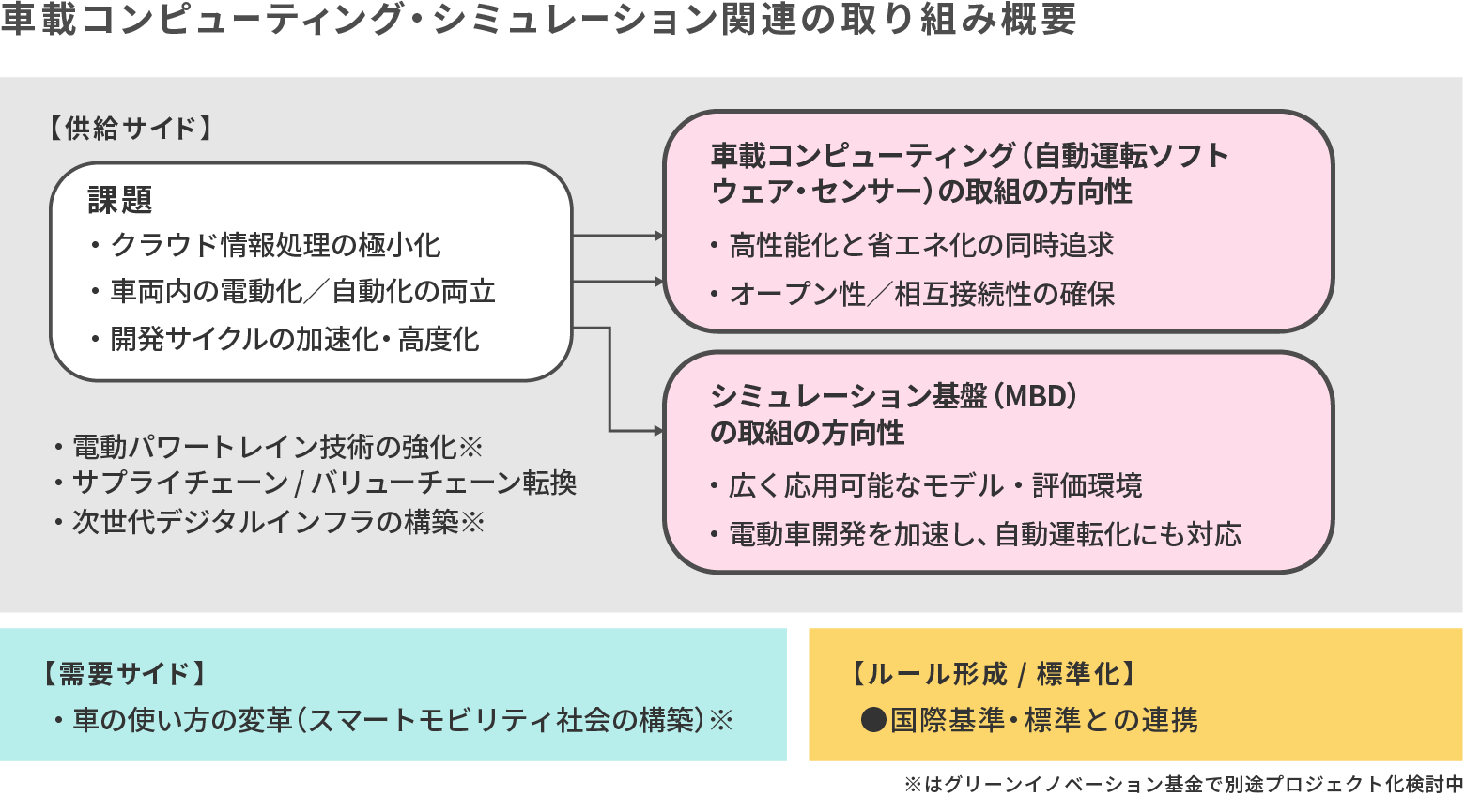
――車載コンピューティングの省エネ化に向けた、2つの研究開発について教えてください
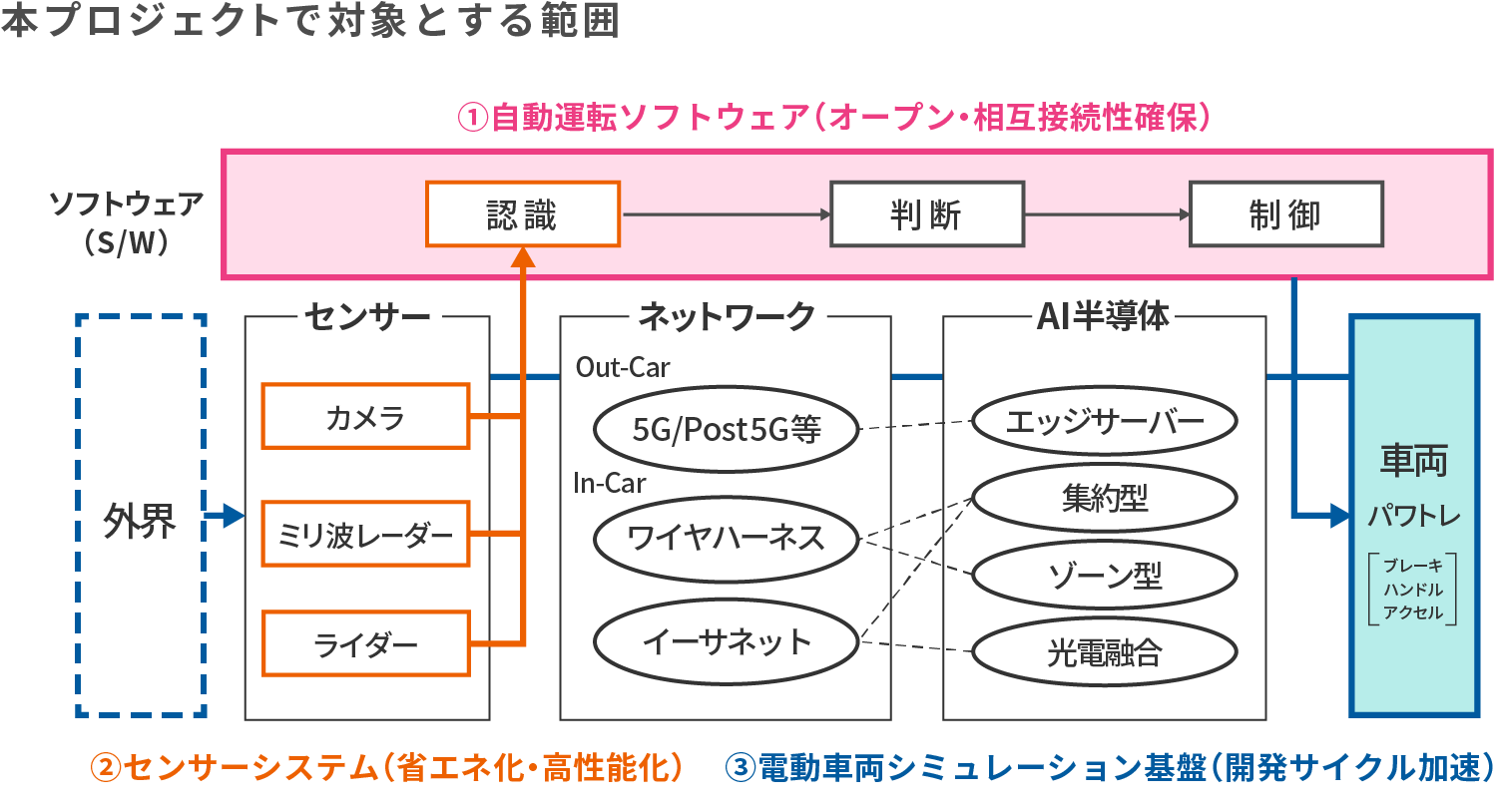
黒田尚氏(以下、黒田氏):グリーンイノベーション基金事業では、「自動運転センサーシステム」と「自動運転ソフトウェア」の開発に取り組んでいます。
そもそも自動運転システムというものは、これまで人間が行っていた認知・判断・操作をシステムが代替するという仕組みです。カメラ等のセンサーで外界情報を認知し、車載ネットワークを通じてAI半導体(AIの演算処理に特化した半導体)に伝達し、何をするかを判断します。その結果がハンドル操作やブレーキ等に反映されて、車両が走ったり曲がったり止まったりします。カメラ等のセンサーで外界情報を認知する部分がセンサーシステムであり、対象物を検知したり車両との距離等を認識したりします。センサーシステムで認知した外界情報に基づき、判断・制御する部分が、自動運転システムのソフトウェアです。
センサーシステムや自動運転システムでは膨大な情報を処理していますが、処理するための計算量が多くなるほど、エネルギー(電気)を使います。それに対して、たとえば重複する計算プログラムを統合すると、同じ情報処理をより少ない電気量でできることになります。このような視点から、システム自体の簡素化・合理化が、車載コンピューティングの省エネ化につながると考えています。
なお、現在の自動運転システムの成熟度は、「高速道での渋滞時における60km/h以下での一定走行」(レベル3相当)といった極めて限定的な条件下において自動運転できる水準となっています。しかし将来的には、ドライバー不要での自動走行(レベル4相当)*2が目標とされているため、現在の自動運転システムよりもさらに多くの環境条件を処理する、つまり情報処理量はさらに増えると見込まれています。
 引用元:経済産業省第5回 産業構造審議会 グリーンイノベーションプロジェクト部会 産業構造転換分野ワーキンググループ資料5「『電動車等省エネ化のための車載コンピューティング・シミュレーション技術の開発』『スマートモビリティ社会の構築』プロジェクトに関する研究開発・社会実装の方向性」p25を参考に作成
引用元:経済産業省第5回 産業構造審議会 グリーンイノベーションプロジェクト部会 産業構造転換分野ワーキンググループ資料5「『電動車等省エネ化のための車載コンピューティング・シミュレーション技術の開発』『スマートモビリティ社会の構築』プロジェクトに関する研究開発・社会実装の方向性」p25を参考に作成車載コンピューティングの省エネ化に向けた技術開発

――自動運転ソフトウェアについて、もう少し詳しく伺えますか
黒田氏:自動運転ソフトウェアの基盤として重視しているのは、相互接続性があるソフトウェアにすることです。自動車を自動走行させるためには、センサー等から受けた情報をソフトウェア上で処理し、AI半導体等を通じて車両操作に変換するわけですが、ソフトウェアと接続するセンサーやAI半導体を特定のものに限定してしまうと、将来の技術進化を取り込めなくなってしまう恐れがあります。そこで、オープンソース型のソフトウェアで、センサー等との相互接続性がある基盤を整備しようとしています。オープンソース型とは、ソースコードを無償で公開し、改変や再配布が可能なものです。オープンソース型にすることによって、多様なAI半導体・車載ネットワーク・センサーとの組み合わせが可能になります。それを活用し、走行環境に応じて柔軟に消費電力を最小化できるようなソフトウェアの設計をしていこうとしています。
――「オープンソース型基盤ソフトウェア」は省エネにどのような影響があるのでしょうか
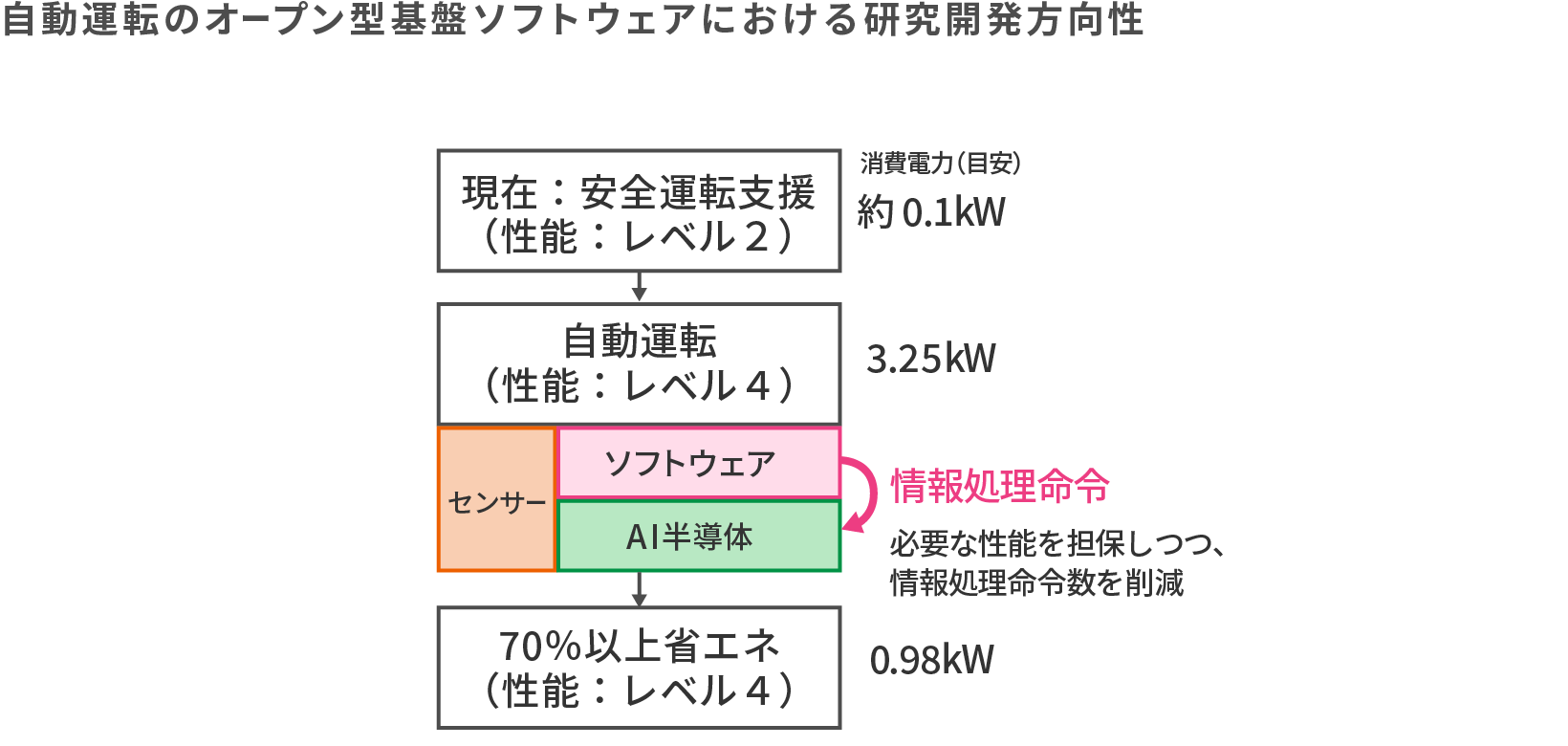
黒田氏:自動運転においては、たとえば「外界物を検出する」「相対的な位置を把握する」「経路を決定する」といったひとつひとつの認識や判断にそれぞれプログラムが働いています。つまり、無数のタスクが処理され、処理されるごとに電力が消費されているわけです。プログラムが複雑で冗長になるほど、AI半導体への命令数が増加してしまいます。
先ほど述べたように、そこをいかに簡素化・合理化していけるかが、省エネに関わります。たとえば、機械学習を使って同じ処理をまとめたり、短縮可能な部分を切り出したりすることはその一例です。あるいは、雪道でのみ必要なタスクが雪環境以外では働かないようにするなど、走行環境に応じて短縮・省略できるようにプログラムを最適化することも考えられます。
さら
 引用元:経済産業省第5回 産業構造審議会 グリーンイノベーションプロジェクト部会 産業構造転換分野ワーキンググループ資料5「『電動車等省エネ化のための車載コンピューティング・シミュレーション技術の開発』『スマートモビリティ社会の構築』プロジェクトに関する研究開発・社会実装の方向性」p28を参考に作成
引用元:経済産業省第5回 産業構造審議会 グリーンイノベーションプロジェクト部会 産業構造転換分野ワーキンググループ資料5「『電動車等省エネ化のための車載コンピューティング・シミュレーション技術の開発』『スマートモビリティ社会の構築』プロジェクトに関する研究開発・社会実装の方向性」p28を参考に作成
――もう一つの「自動運転センサーシステム」における省エネについて教えてください
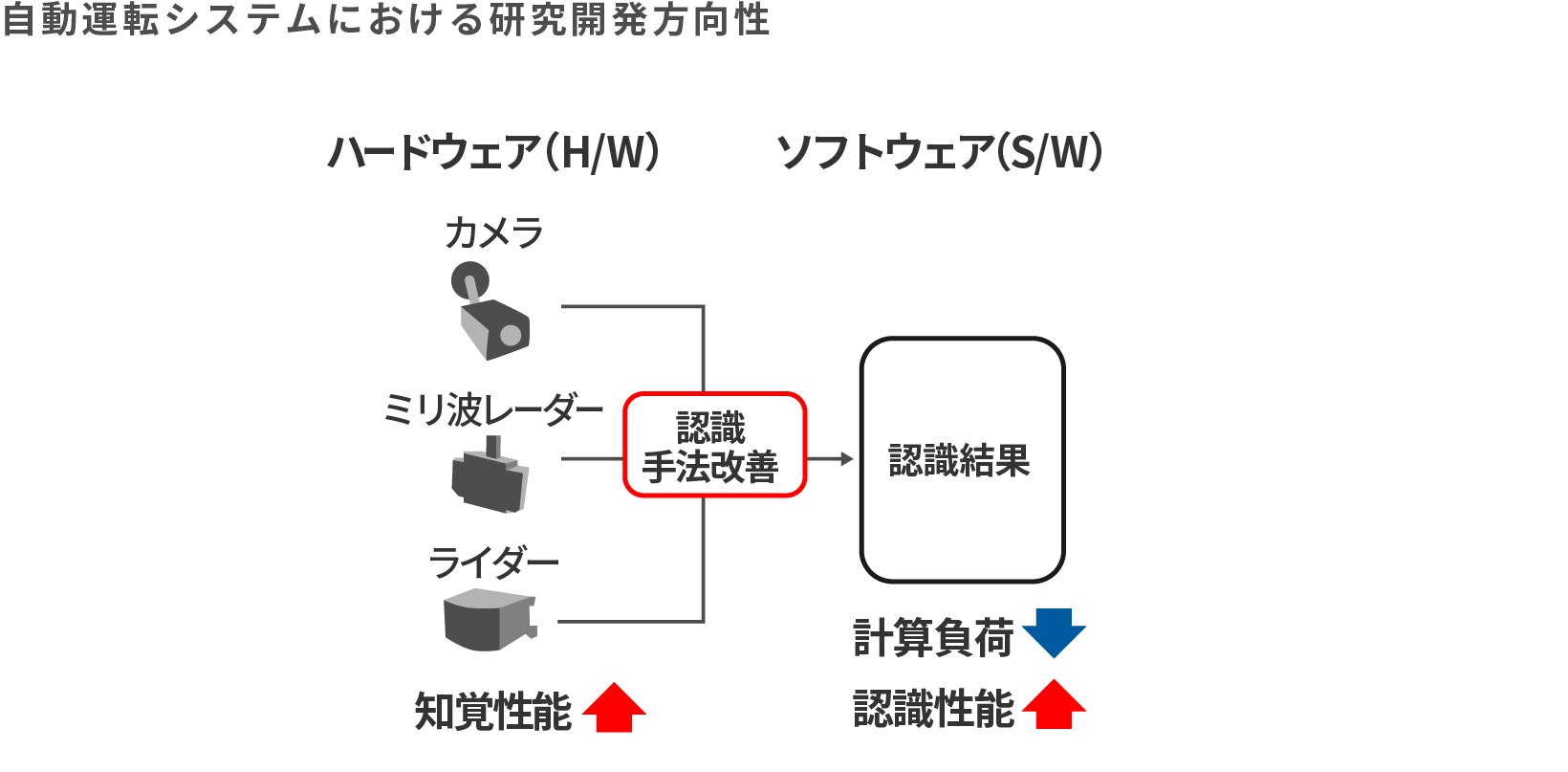
黒田氏:自動運転センサーシステムは、カメラやレーダーを使って周辺状況を知覚し、ソフトウェアに伝達するシステムです。実は自動運転に関わる情報処理のうち、対象の検出・追跡・特徴抽出といった「認識」部分に多くの計算資源が割かれ、エネルギーが使われています。つまり、「認識」の精度を高め、余計な計算がいらなくなるほど省エネにつながるわけです。
「認識」の精度を高めるには、カメラやミリ波レーダー等のハードウェアの性能を高めることと、捉えたデータを効率的に統合して処理する部分の効率化と、2方面から改善をはかることが考えられます。ハードウェアの性能は、知覚する精度自体に関わります。一方データ処理の効率化というのは、データをどのように処理するかという手順次第で、認識のスピードや正確さが変わるということです。たとえばさまざまな情報から信号や標識だけを抽出するようなプログラムがあれば、走行に必要な情報認識がより早く行われることになります。この自動運転センサーシステムの開発は、前述した自動運転のオープン型基盤ソフトウェアの開発と同様、レベル4自動運転機能を担保しつつ、70%以上の消費電力削減に寄与することを目標としています。
 引用元:経済産業省第5回 産業構造審議会 グリーンイノベーションプロジェクト部会 産業構造転換分野ワーキンググループ資料5「『電動車等省エネ化のための車載コンピューティング・シミュレーション技術の開発』『スマートモビリティ社会の構築』プロジェクトに関する研究開発・社会実装の方向性」p31を参考に作成
引用元:経済産業省第5回 産業構造審議会 グリーンイノベーションプロジェクト部会 産業構造転換分野ワーキンググループ資料5「『電動車等省エネ化のための車載コンピューティング・シミュレーション技術の開発』『スマートモビリティ社会の構築』プロジェクトに関する研究開発・社会実装の方向性」p31を参考に作成シミュレーション技術の活用拡大に向けて進めていくこと
――シミュレーション技術という開発テーマもありますが、どのような取り組みでしょうか
伊藤氏:2035年時点ですべての販売される新車が電動車になっているという目標があるわけですが、それを現実化するには開発サイクルを加速していく必要があります。 これまで車の開発は、必要な性能要求を具体化し、システム設計・機器設計・検証と順に進め、実機ですり合わせを繰り返していたため、完成まで約4年もの歳月がかかっていました。このプロセスを効率化し、開発期間を短縮することができれば、電動車への移行も加速できます。そこで、高精度のシミュレーションモデルを使った開発を実用化し、効率的に検証・開発・設計のサイクルを回せないかと考えています。 今取り組んでいるのは、国内自動車メーカー・部品メーカーが共通的に利用可能なシミュレーション基盤づくりです。電動車普及が早期に進むことがカーボンニュートラル実現へのステップとなりますので、開発期間短縮につながるシミュレーション技術についても今回のグリーンイノベーション基金事業で取り組んでいきます。
 引用元:経済産業省第5回 産業構造審議会 グリーンイノベーションプロジェクト部会 産業構造転換分野ワーキンググループ資料5「『電動車等省エネ化のための車載コンピューティング・シミュレーション技術の開発』『スマートモビリティ社会の構築』プロジェクトに関する研究開発・社会実装の方向性」p11を参考に作成
引用元:経済産業省第5回 産業構造審議会 グリーンイノベーションプロジェクト部会 産業構造転換分野ワーキンググループ資料5「『電動車等省エネ化のための車載コンピューティング・シミュレーション技術の開発』『スマートモビリティ社会の構築』プロジェクトに関する研究開発・社会実装の方向性」p11を参考に作成――「電動車両シミュレーション基盤」について教えてください
黒田氏:ここで使うのは、デジタルツインと言われる技術です。現実の物や環境から収集したデータを使い、コンピュータ上で同じ物・環境を再現します。なお、開発だけではなく開発したものの性能評価にも、これまでは実機が使われてきました。シミュレーション技術を進化させれば、高精度シミュレーション基盤を使って開発した車の性能評価を行うことが可能です。今後、電動車として満たすべき新たな安全規格等も踏まえられるようにシミュレーション基盤を進化させ、電動車開発をスピーディに進められる体制を作っていきます。 なお、目標としては、シミュレーション精度が90%以上、かつ実機を用いた性能検証期間をシミュレーションによって半減させられるレベルを目指しています。これにより電動車の開発サイクルを従来の4年から2年に半減できたらと考えています。
期待される効果とこれからの展望

――車載コンピューティング・シミュレーション技術の開発で、CO2削減効果はどの程度が見込まれるでしょうか
伊藤氏:電動自動運転車の普及時に、高度なエコドライブや渋滞解消が進むことで見込まれるCO2削減効果について、ご紹介します。まず、平常走行時における高度なエコドライブの場合、2030年では高速道路で、2050年には一般道で実現できると想定しています。周辺状況を踏まえてシステムが最適制御をし、余計なブレーキ操作が防止されることで少なくとも7%の走行性能改善が見込まれます。この結果、CO2削減効果としては、2030年時点で日本では年間約169万トン、2050年時点で日本では約769万トン、世界では約2億トンのCO2削減が期待されます。
同じく最適制御が行われ、坂の変化点やトンネル等、人の操作に起因する渋滞が起こらなくなるとしたら、2050年時点で日本では約418万トン、世界では約1.1億トンのCO2削減が見込まれます。
さらに事故が起こらない社会になってくると、事故に起因する渋滞も解消されます。たとえば現在は高速道での渋滞の約16%が事故に起因していますが、それがなくなります。一般道での削減と合わせて、2050年時点では日本で約133万トン、世界で約0.3億トンが削減できると考えています。
――経済効果はいかがでしょうか
伊藤氏:2030年時点の自動運転車市場は40兆円規模、関連部品産業市場が別途3兆円規模あると言われています。仮に車両価格を自動運転レベル3で500万円、レベル4以上を1,000万円とし、センサー部品類に限って積算してみたときの総額としては、2040年には車両価格がレベル3で300万円、レベル4以上で600万円に抑えられることが想定されます。そうした背景から市場がさらに広がり、自動運転車市場として143 兆円、加えて関連部品産業市場を5兆円と推計。総額で年間約148兆円の経済効果が出ると想定しています。
――今後の展望をお聞かせください
伊藤氏:自動運転の本格的な実用化が見込まれる2030年以降に向けては、性能は維持・向上し続けつつ、徹底した省エネができるような車載コンピューティング技術がとても重要になります。カーボンニュートラル実現に向けても、また、製品競争力の観点からも、欠かせません。長く経済を牽引してきた我が国の自動車産業が、一層の基幹産業として発展していけるよう、開発サイクル全体の進化にも力を入れながら取り組んでいきます。
- *1 電動車とは、電気自動車、燃料電池自動車、プラグインハイブリッド自動車、ハイブリッド自動車を含めた総称。電気自動車というのは動力源の100%が電気で、ハイブリッドというのはガソリンと電気の両方を動力源にしている。プラグインハイブリッドとはガソリンエンジンを積んでおり、かつ充電もできるタイプを指す。燃料電池自動車は水素をエネルギーに用いる場合を指す。
- *2 自動運転のレベルについては、記事「自動走行の普及が進む社会に向けて 車載コンピューティング・シミュレーション技術とは」内の図版参照。