New EV Simulation Models Aim to Cut Development Time
High-precision shared models support autonomous driving development

To reduce CO2 emissions from automobiles, growing expectations are being placed on wider EV adoption and the deployment of autonomous driving technologies, which could also help ease traffic congestion. One of NEDO’s Green Innovation (GI) Fund Projects, Development of In-vehicle Computing and Simulation Technologies for Energy Conservation of Electric Vehicles, includes several R&D initiatives. One of them is the electric vehicle simulation infrastructure project, in which the Japan Automobile Research Institute (JARI) is developing simulation models for electric vehicles compatible with autonomous driving functions.
As the auto industry moves toward greater electrification and wider use of autonomous driving technologies, these models could significantly shorten development time.
The project has already met most of its simulation-accuracy targets for major individual components. Development is now steadily advancing toward a goal of achieving more than 90% agreement between actual and simulated vehicle behavior as a whole (dynamic simulation accuracy of 90% or higher). Once that target is met, the time required for performance verification using physical vehicles could be cut in half.
Moving Beyond the Vehicle Model Black Box
Model-Based Development (MBD), which uses computer-based simulation models to design and verify vehicles before physical prototypes are built, is now widely used by OEMs and component suppliers. By enabling performance testing before the prototyping stage, MBD has advanced alongside gains in computing power, helping shorten development cycles and reduce costs.
However, there are limits to how far individual companies can improve simulation accuracy on their own. While OEMs possess vehicle models, independently developing highly accurate models for every component is difficult. OEMs can collaborate with suppliers, but intellectual property and confidentiality constraints prevent models provided by one supplier from being shared directly with another. As a result, many vehicle models remain black boxes. This means that even when component performance appears improved in simulations, it may still fail to deliver the expected performance once installed in an actual vehicle.

Hisashi Kuroda, Project Manager and Director of the Next-Generation EV Traction Motor & Autonomous Driving System Section, Automotive and Storage Battery Department, NEDO.
To address these challenges, one of the project’s key goals is to build highly accurate models for use across the automotive industry, explains Hisashi Kuroda, Project Manager and Director of the Next-Generation EV Traction Motor & Autonomous Driving System Section at NEDO. A shared model reflecting the characteristics of all components would allow OEMs to verify overall vehicle behavior more accurately. Suppliers, meanwhile, could develop components while evaluating their performance within the vehicle.
“The benefits of this initiative will extend to the research field as well,” Kuroda adds. Universities and other institutions developing autonomous driving algorithms could use a shared model to repeatedly evaluate performance without physical vehicles, improving research efficiency.
“Europe has taken the lead in MBD initiatives, but many of those efforts are being pursued on a company-by-company basis. Few efforts have been made to create an industry-wide shared model. A key feature of this initiative in Japan is that OEMs and suppliers have been able to work toward a common direction,” Kuroda says, highlighting the initiative’s pioneering approach. If Japan can establish such a model, it could also take a global lead in the standardization of automotive development.
A Shared Model for Collaborative Vehicle Development
Shinichi Takayama of the Japan Automobile Research Institute (JARI), who leads development of the shared model project, explains that vehicle simulation requires three types of models. “The first is the vehicle model, which serves as the core of the simulation. The second is the road model on which the vehicle travels. The third is the surrounding-vehicle model, representing other vehicles around it. A simulation works only when boundary conditions are also defined to determine how these models operate under specific scenarios,” Takayama says, outlining the essential elements required for vehicle simulation.

Shinichi Takayama, Field Manager and Senior Chief Researcher, Autonomous Driving Research Division, Japan Automobile Research Institute (JARI)
Among these, the vehicle model itself requires the highest level of accuracy. For this project, JARI adopted a 1D model compatible with simulation software such as MATLAB/Simulink, Carsim and CarMaker, widely used by OEMs and suppliers as standard engineering tools. Takayama explains the reasoning behind the choice: “We wanted to provide models that companies could use within the environments they already work with, reducing the need to learn new tools.”
Building a shared model on widely used software platforms also makes data collaboration between companies easier. An OEM could use the common model, update part of it to reflect technologies it is developing in-house, and then ask suppliers to develop components based on that updated model. Suppliers, in turn, could revise models of their own components and send them back to the OEM, enabling smoother data exchange between companies.
Takayama says the shift could reshape how vehicles are developed: “Until now, each company has focused on developing the components it does best. But with a shared model, we may be moving closer to a more collaborative approach to vehicle development.”
90% Accuracy Model Within Reach
The goal of the project is to achieve dynamic simulation accuracy of 90% or higher. “Ninety percent is by no means a low target,” Kuroda says. “But if users are to adopt the model, it must offer a sufficient level of reliability. We concluded that 90% would be a level we could recommend with confidence.”
The project has also set accuracy targets for individual components. At present, many components are beginning to achieve figures close to those targets, and the team now sees a clear path toward reaching 90% accuracy for the vehicle as a whole.
“Based on the accuracy already achieved for individual components, we believe the 90% target is fully attainable,” Takayama says.
The project plans to build four vehicle models with different dynamic characteristics. The first is a baseline electric vehicle model. The second captures variations within the same vehicle category. The third represents a vehicle with a different drive layout. The fourth is a model of a vehicle with a different center-of-gravity position.
To improve model accuracy, the project needed to incorporate measurement data from actual vehicles. It therefore selected, as its first evaluation vehicle, a representative electric vehicle available when development began in 2022.
Work on the second model began in 2024 using a front-wheel-drive vehicle in the same category as the first. Modeling of the third began in 2025 using a rear-wheel-drive vehicle.
A fourth vehicle is now being considered. Candidates include commercial vehicles and others with a center of gravity markedly different from those of the first three models.
Improving Component Model Accuracy
Building a highly accurate vehicle model requires equally accurate models for the key components that make up the vehicle. At JARI, engineers measure component characteristics using a range of testing systems and real-vehicle evaluations, then incorporate that data into the models to improve their accuracy.
For tire-characteristic testing, JARI used a flat-belt tire testing machine. The system recreates conditions close to real-world driving by running tires on a high-speed rotating flat belt. Combined with on-road vehicle testing, it was used to collect performance data for 10 types of tires.
Based on those results, the team developed a method for predicting tire characteristics and has now succeeded in keeping simulation error within its 5% target. Tires are considered among the most difficult vehicle components to model, making this level of accuracy a significant achievement.
For motors and batteries, characteristics were measured through hub dynamometer testing. In this method, the vehicle’s wheels are removed and dynamometers are connected directly to the hubs to evaluate drivetrain performance. Engineers measured factors such as motor efficiency and battery power consumption, then used the data to build simulation models. As a result, these components have achieved a high level of accuracy, with errors kept within 1%.
For evaluating the characteristics of suspension and steering systems, JARI used a K&C testing machine. The vehicle’s four wheels are placed on separate independent platforms, whose heights can be adjusted individually to freely change the vehicle’s posture. In addition, specialized fixtures make it possible to measure center-of-gravity height and moment of inertia. Comparing experimental results with simulation results confirmed a high level of agreement, with errors kept within 1%.

Measuring center-of-gravity height on the K&C testing machine, with the data used to refine the simulation model
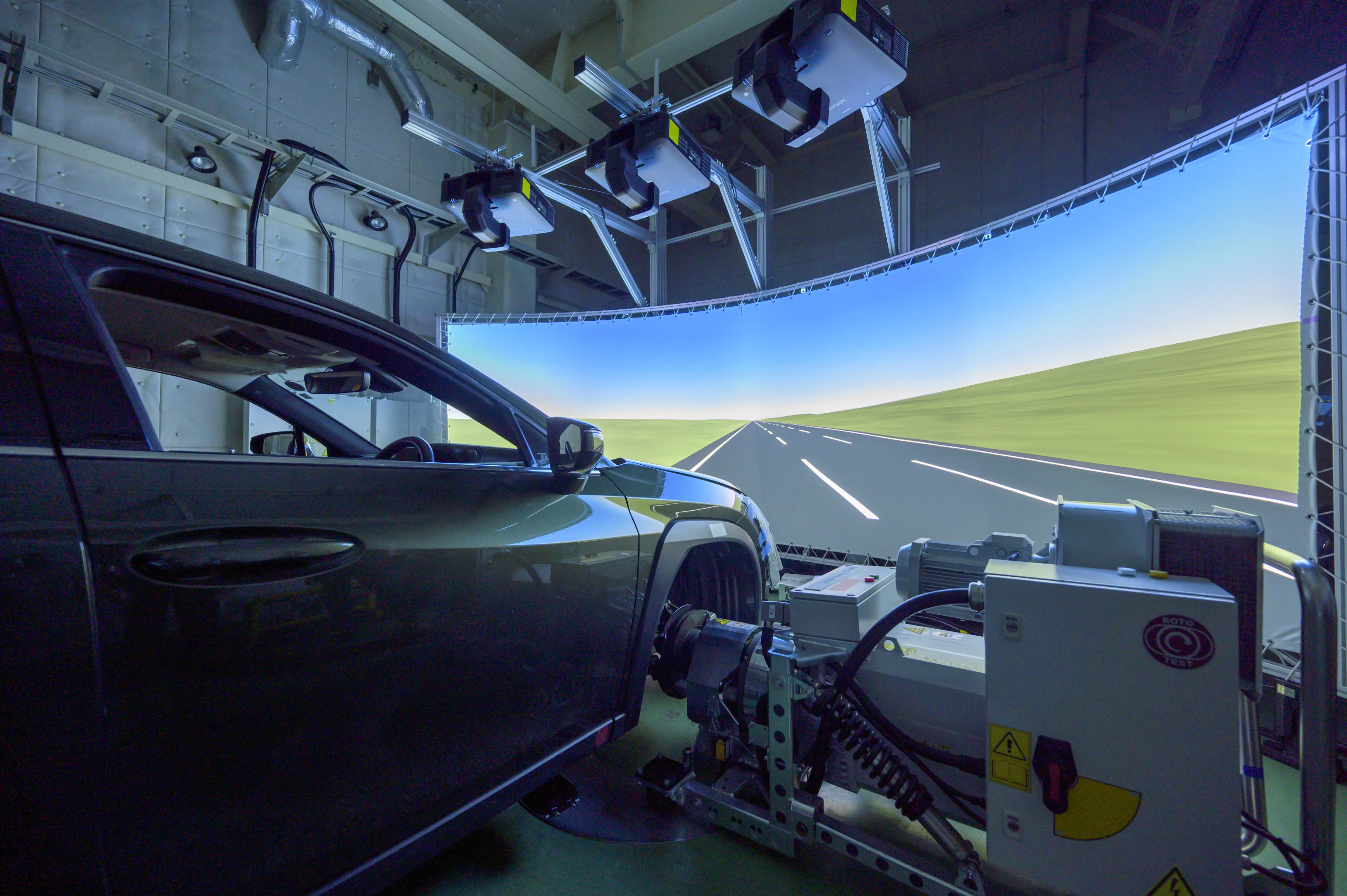
The project also developed sensor models for autonomous driving and advanced driver-assistance systems (ADAS). By feeding simulated real-world driving signals to sensors such as millimeter-wave radar and cameras, engineers were able to reproduce a wide range of traffic situations even while the vehicle remained stationary.
Traffic scenarios were recreated by projecting images of roads and surrounding vehicles onto a screen while feeding simulated millimeter-wave reflection signals to the vehicle. This allowed the team to obtain data needed for modeling, including object-recognition performance and braking timing.
After incorporating those data into the models, the activation timing of automatic emergency braking (AEB) in simulations reached a level of accuracy nearly equivalent to that of actual vehicles.
Simulating traffic conditions for autonomous driving and ADAS using projected images and simulated millimeter-wave radar signals
Emergency Braking Meets European Standards
Modeling of the major components has already been completed for the first evaluation vehicle. The team is now comparing full-vehicle simulation results with actual vehicle test results to verify overall model accuracy.
Test facilities also play a vital role in real-world validation. JARI operates test courses at the Shirosato Test Center that include a 5.5-kilometer circular track and a straight course of up to 1.5 kilometers, enabling a wide range of driving tests.

Conducting a steady-state circular turning test on the test course (Source: JARI)
In addition, JARI’s specific-environment test facility at Jtown in Tsukuba, equipped with a 200-meter straight course, can recreate weather conditions such as rain and fog, as well as visibility conditions including backlighting and nighttime driving—all indoors. Using this facility, engineers can closely evaluate how cameras and other sensors recognize the surrounding environment.
Rainfall conditions ranging from light mist equivalent to about 5 millimeters per hour to heavy rain of 80 millimeters per hour can be simulated, covering many of the weather conditions encountered in Japan.

Recreating fog conditions at the specific-environment test facility, where weather and visibility conditions can be simulated
Using these facilities, the team compared real-vehicle test results with simulation results and confirmed that the vehicle dynamics simulation met ISO 19364 requirements in steady-state circular turning tests. ISO 19364 is the international standard for measuring agreement between simulation and actual vehicle behavior. In slalom tests, results for acceleration gain, yaw-rate gain and steering-angle phase were also close to the project’s target values.
The team also compared experimental and simulation results for the AEB function across multiple scenarios involving stationary vehicles, moving vehicles and pedestrians. The results confirmed that every scenario fell within the tolerance ranges specified by Euro NCAP, Europe’s automotive safety assessment program.
Vehicle model running in computer simulation; white vehicle: experimental results; green vehicle: simulation results; minimizing the difference between the two is key (Source: JARI)
Only the first vehicle model has achieved these results so far. For the second vehicle, collection of component-level test data is nearly complete, and the team aims to complete the full vehicle model by FY2026. Work on the third vehicle is now moving into full-scale testing.
“By FY2028, when the GI Fund Projects are scheduled to conclude, we intend to bring the accuracy of all vehicle models, including the fourth model now under consideration, up to their target levels,” Takayama says.
Taking Japan’s De Facto Standard Global
As the project moves closer to its goal of achieving dynamic simulation accuracy of 90% or higher, it will enter a new phase focused on broader adoption of the shared model among OEMs and suppliers.
“We’ll also be stepping up our outreach efforts,” Kuroda says. “There’s no single right way to use the model. We want as many companies as possible to use it, and to help us make it even more practical through their feedback.”
The next major milestone will be standardization. “Rules for the interfaces used to exchange data between models still differ from one OEM to another, and suppliers have long had to adapt to each of them,” Takayama explains. “If those interfaces can be unified, data can move far more smoothly.”
If such a framework comes into wide use across the industry, it could become established as a de facto standard and eventually evolve into a formal standard. To support that effort, the project also plans to work closely with the Japan Automotive Model-Based Engineering Center (JAMBE), an organization established by OEMs and suppliers to promote the adoption and wider use of MBD.

From left: Shoichiro Teranishi of JARI; Shinichi Takayama of JARI; Hisashi Kuroda, Project Manager at NEDO; and Suguru Fukui, Project Coordinator at NEDO. Photographed inside the special-environment test facility under simulated fog conditions.
Looking further ahead, once this GI Fund initiative—the development of electric vehicle simulation infrastructure—concludes and the shared model gains broad adoption among OEMs and suppliers, a path may open toward international standardization. Many Japanese component suppliers already operate globally, creating the possibility that the shared model could also be used in vehicle development overseas.
If that happens, the shared model could help deliver its benefits globally by shortening development times for vehicle electrification and automation. Broader international adoption may also strengthen the case for the framework to develop over time into an international standard, contributing not only to Japan’s carbon-neutral goals but also to decarbonization worldwide.
By supporting simulation-based development for electric vehicles, NEDO aims to encourage EV adoption and advance the deployment of autonomous driving technologies that may help ease traffic congestion, thereby contributing to progress toward carbon neutrality.


