電動車両シミュレーションに革新、開発期間の短縮狙う
自動運転機能に対応、精度の高い共通モデルを活用

自動車からのCO2排出量を削減するために、電動車両の普及や、交通渋滞の削減などにつながる自動運転の社会実装が期待されています。NEDOがグリーンイノベーション(GI)基金事業「電動車等省エネ化のための車載コンピューティング・シミュレーション技術の開発」プロジェクトの一環として進めている「電動車両シミュレーション基盤の構築」では、日本自動車研究所(JARI)が自動運転に対応した電動車のシミュレーション・モデルの開発を行っています。カーボンニュートラルに向けた自動車の電動化・自動化の普及促進が求められるなか、このシミュレーション・モデルを用いることで開発期間を大幅に短縮することができます。既に主要な部品単体におけるシミュレーション精度に関してはおおよそ目標をクリア。電動車両全体として実際の挙動とシミュレーション上の挙動が90%以上の精度で一致すること(動力学シミュレーション精度90%以上)を目標に、現在着実に開発を進めています。目標を達成すれば、実機を用いた性能検証期間を半減できます。
車両モデルのブラックボックスから脱却
実物を製作する前にコンピュータ上のシミュレーション・モデルを使用して設計・検証を行うMBD(Model-Based Development:モデルベース開発)は、現在多くの完成車メーカー(OEM)ならびに部品のサプライヤーで活用されています。試作前の段階で性能検証できるMBDは、コンピュータ性能の向上とともに進化し、設計期間の短縮やコスト削減に大きく貢献してきました。
しかし、シミュレーション精度をさらに高めようとすると、各社単独での取り組みには限界があります。OEMは車両モデルを保有していますが、すべての部品について高精度のモデルを独自に構築することは困難です。また、OEMがサプライヤーと連携することは可能ですが、知的財産や機密保持の制約があるため、あるサプライヤーから提供された部品のモデルをそのまま別のサプライヤーへ共有できません。その結果、車両モデルの多くはブラックボックス化してしまいます。このため、モデル上では部品性能が向上しているにもかかわらず、実際の車両に組み込んだ際に想定の性能に達しないこともあります。
こうした課題を解決するため、「自動車業界全体で利用できる高精度なモデルを構築することが、このプロジェクトの大きな目標です」とNEDO 自動車・蓄電池部 基盤ユニット 次世代モーター・車載CPチーム チーム長の黒田尚プロジェクトマネージャーは説明します。すべての部品の特性を反映する共通モデルを利用できれば、OEMは車両全体の挙動をより正確に検証することが可能になります。またサプライヤーにとっても、自社部品の性能を車両全体の中で評価しながら開発することが可能になります。

NEDOの黒田尚プロジェクトマネージャー(自動車・蓄電池部 基盤ユニット 次世代モーター・車載CPチーム チーム長)
「この取り組みは研究分野にも波及します」と、黒田プロジェクトマネージャーはさらなる効果を語ります。例えば大学などで自動運転アルゴリズムを研究する場合、共通モデルを使えば実車を用いずに性能評価を繰り返すことができ、研究開発の効率が高まります。
「MBDの取り組みは欧州が先行していますが、多くは個社単位での取り組みです。業界全体で共通モデルを作ろうという動きはほとんどありません。日本ではOEMとサプライヤーが方向性を共有できたことが大きな特徴です」と、黒田プロジェクトマネージャーは、この取り組みの先進性を説明します。日本で業界共通のモデルを確立できれば、自動車開発における標準化の面でも世界をリードできる可能性があります。
共通モデルを中心にみんなでクルマを開発
共通モデルの開発を担当するJARI 自動走行研究部 主管 主席研究員の高山晋一氏は、車両シミュレーションには三つのモデルが必要だと説明します。「一つ目は、シミュレーションの中心となる自車モデル。二つ目は、自車が走行する道路モデル。三つ目は、周囲を走る車両などの他車モデルです。さらに、これらのモデルをどのような条件で走行させるのかといった境界条件を設定することで、初めてシミュレーションが成立します」と高山氏は、シミュレーションに必要となる基盤について語ります。
この中でも特に高い精度が求められるのが自車モデルです。今回のプロジェクトでは、多くのOEMやサプライヤーが汎用ツールとして利用している「MATLAB/Simulink」や「CarSim」、「CarMaker」といったシミュレーション・ソフトウエアで利用可能な1Dモデルを採用しました。「多くの企業が現在使っている環境で利用できるモデルを提供することで、新しいツールを習得する負担を減らせます」と、高山氏は1Dモデルを選んだ理由を説明します。

JARI 自動走行研究部 主管 主席研究員の高山晋一氏
さらに、汎用ツール上で共通モデルを構築することで、企業間のデータ連携が容易になります。例えば、共通のモデルを利用して、OEMが共通モデルの一部に自社で開発中の技術を反映させて更新し、そのモデルを基にサプライヤーへ部品開発を依頼、サプライヤー側は自社部品のモデルを更新してOEMに返すといったやり取りがスムーズに行えるようになります。「これまでは各社が得意な部品を個別に開発する形でした。しかし共通モデルがあれば、みんなでクルマを開発するという形に近づくのではないでしょうか」と、高山氏は将来の開発体制の変化を予測します。
精度90%のモデル作成は射程圏内
本プロジェクトが目指しているのは、動力学シミュレーション精度90%以上です。「90%という精度は決して低い目標ではありません。しかしユーザーに利用してもらうためには、十分な信頼性が必要です。90%であれば自信をもって提案できる水準だと考えました」と、高い目標を掲げた理由について黒田プロジェクトマネージャーは説明します。プロジェクトでは、部品ごとにも精度目標を設定しています。現時点では多くの部品で目標に近い数値が得られ始めており、車両全体で90%の精度を達成する見通しが立ってきました。「個々の部品の精度を見ても、90%という目標は十分に達成可能だと考えています」と、高山氏は今後の見通しについて力強く語ります。
開発においては、車両運動が異なる4種類の車両モデルを構築する計画です。1台目は最初のベースとなる電動車モデル、2台目は同じカテゴリー車両での差異を表現するモデル、3台目は異なる駆動方式のモデル、4台目は重心位置が異なる車両モデルです。
モデル精度を高めるには、実車の計測データを反映する必要があるため、開発を始めた2022年当時の代表的な電動車を評価車両1台目として採用しました。2024年からモデル化を開始した2台目には評価車両1台目と同じ前輪駆動の車両を、さらに2025年からモデル化を開始した3台目には後輪駆動の車両を選定しています。4台目は現在検討中ですが、重心位置が1~3台目とは大きく異なる車両として商用車などが候補に挙がっています。
実験装置・設備を駆使して部品のモデル精度を高める
高精度な車両モデルを構築するためには、車両を構成する主要部品のモデル精度を高めることが不可欠です。JARIでは、各種の計測システムや実車試験を用いて部品特性を測定し、そのデータをモデルに反映することで精度向上を図っています。
タイヤの特性測定には、フラットベルト式タイヤ試験機を活用しました。これは高速で回転する平らなベルト上でタイヤを走行させることで、実際の走行状態に近い条件を再現できる装置です。さらに実車試験も組み合わせ、10種類のタイヤについて特性データを取得しました。これらのデータを基にタイヤ特性を予測する手法を開発し、現在ではシミュレーション誤差を目標である5%以内に抑えることに成功しています。タイヤは車両部品の中でも特にモデル化が難しいとされており、この精度は大きな成果と言えます。
モーターやバッテリーについては、ハブダイナモ試験によって特性を測定しました。この試験では車両のホイールを外し、車軸(ハブ)にダイナモメーターを接続して駆動系の性能を評価します。モーター効率やバッテリー消費電力などを測定し、そのデータを基にモデル化を行いました。その結果、これらの部品では誤差1%以内という高い精度を実現しています。
サスペンションやステアリングの特性評価には、振動試験機を使用しました。この装置では車両の四輪をそれぞれ独立した台に載せ、台の高さを個別に変化させることで車両姿勢を自在に変えられます。加えて、専用の治具を使用することで重心高や慣性モーメントを計測することが可能です。実験結果とシミュレーション結果を比較したところ、誤差1%以内という高い一致度を確認しています。

振動実験機において重心高を計測している様子。得られた特性データをモデルに反映する。
さらに、自動運転や先進運転支援システム(ADAS)に関わるセンサーについてもモデル化を進めました。ミリ波レーダーやカメラなどのセンサーに対して、実際の走行環境を模擬した信号を与えることで、静止状態の車両でも様々な交通状況を再現できます。道路や他車を表現した映像をスクリーンに投影し、同時にミリ波の疑似反射信号を車両へ入力することで交通状況を再現しました。これにより対象物の認識状況や制動タイミングなど、モデル化に必要なデータを取得しています。これらのデータをモデルに反映した結果、シミュレーション上での衝突被害軽減ブレーキ(AEB)作動タイミングは実車とほぼ同等の精度に達しました。
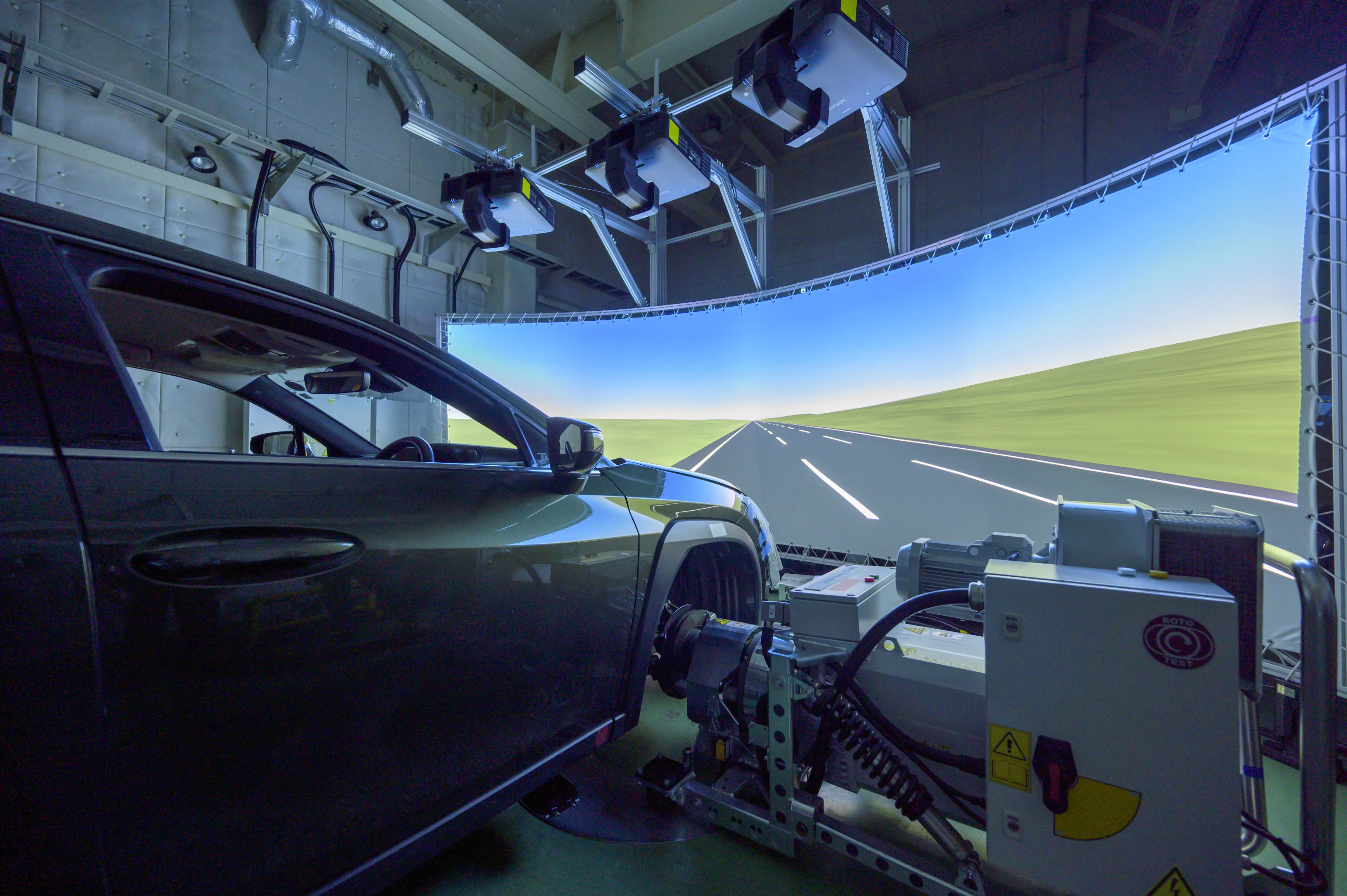
自動運転や先進運転支援システムをモデル化するために、画像をスクリーンに投影し、ミリ波レーダーも疑似反射信号を与えて交通状況を模擬している様子
緊急自動ブレーキで欧州の規格を満たす
主要部品のモデル化は、評価車両1台目については既に完了しています。現在は車両全体モデルによるシミュレーション結果と実車試験の結果を比較し、モデル精度の検証を進めています。実車試験を行ううえで重要になるのが試験設備です。JARIには、全長5.5kmの周回路や、最長1.5kmの直線路などのテストコースが整備されており、様々な走行試験が可能です。

テストコースで定常円旋回の試験を行っている様子(出典:JARI)
さらに、200mの直線路を備えた特異環境試験場では、雨や霧といった天候条件や、逆光・夜間などの視界条件を屋内で再現できます。この試験場を利用することで、カメラや各種センサーによる周辺環境認識性能を詳細に評価できます。降雨量は1時間あたり5mm程度の霧状態から80mmの豪雨まで再現可能で、日本で想定される多くの気象条件をカバーしています。

異なる天候条件や視界条件を再現する特異環境試験場で霧状態を再現させているところ
こうした設備を用いて実車試験とシミュレーション結果を比較したところ、車両を一定半径の円軌道で走行させる定常円旋回試験では、車両運動シミュレーションと実車試験の一致度を評価する国際規格ISO19364の要求事項を満たしていることを確認しました。また、ジグザグに走行するスラローム試験でも、加速度や角速度のゲインや操舵角の位相といった特性の差は目標値に近い水準に達しています。
さらに、AEB機能についても、静止車両・移動車両・歩行者など複数のシナリオで実験結果とシミュレーション結果を比較しました。その結果、すべてのシナリオで欧州の自動車安全評価制度であるEuro NCAPが定める許容範囲を満たしていることを確認しています。
コンピュータ上で車両モデルを走らせている様子。白い車が実験結果で緑の車がシミュレーション結果。両者のずれを抑えることが重要である。(出典:JARI)
現在、上記の結果を達成したのは、1台目の車両についてです。2台目の車両に関してはほぼ部品単位での試験結果の収集は終わっており、2026年度までに全体モデルの完成を目指します。3台目の車両に関しては、これから試験を本格化する段階です。GI基金事業が終了する2028年度までには、現在検討中の4台目を含めて「すべての車両モデルの精度を目標まで高めていくつもりです」と高山氏は意気込みを語ります。
日本でのデファクトから国際規格へ
動力学シミュレーション精度90%以上の目標を達成していくとともに、今後は開発した共通モデルを多くのOEMやサプライヤーに利用してもらう段階へと移行します。「これからは広報活動にも力を入れていきます。モデルの使い方に正解はありません。多くの方に利用してもらい、そのフィードバックを通じて実用性をさらに高めていきたいと考えています」と黒田プロジェクトマネージャーは、今後の方針について語ります。
その先に見据えているのが標準化です。「モデル間でデータをやり取りするインタフェース部分には、OEMごとに異なるルールがあり、サプライヤーはそれに合わせるため苦労してきました。インタフェースを共通化できれば、データの流通性は大きく高まります」と高山氏は説明します。こうした仕組みが業界で広く利用されるようになれば、デファクトスタンダードとして定着し、将来的には標準規格へ発展していく可能性があります。このため、OEMやサプライヤーが中心となって発足したMBDを推進・普及するための団体であるMBD推進センター(JAMBE)とも広く連携していきます。

左からJARIで本プロジェクトの開発に携わる寺西翔一朗氏(自動走行研究部 自動走行MBDグループ 研究員)、JARIの高山氏、NEDOの黒田プロジェクトマネージャー、NEDOにて本プロジェクト遂行に関わる福井傑主査(自動車・蓄電池部 基盤ユニット 次世代モーター・車載CPチーム)。霧状態を再現した特異環境試験場内にて
さらにGI基金事業での本プロジェクトが終了し、OEMやサプライヤーに共通モデルが広まった先には、国際規格化という展望があります。日本の部品サプライヤーの多くはグローバルに事業を展開しているため、海外の自動車開発でも共通モデルが使われる可能性があります。そうなれば、共通モデルによる自動車の電動化・自動化の開発期間短縮というメリットをグローバルに提供できるようになります。グローバルに活用が進むことで、将来的に国際標準へと発展していく可能性が期待され、日本だけでなくグローバルなカーボンニュートラル化に貢献できます。NEDOは電動車両のシミュレーション開発を支援することで、電動車両の普及促進や交通渋滞などの削減につながる自動運転の社会実装の推進に貢献し、カーボンニュートラルの早期の達成を後押ししていきます。


